
Moduł księżycowy Apollo -Apollo Lunar Module

Apollo 16 LM Orion na powierzchni Księżyca, 1972 r
| |
| Producent | Grummana |
|---|---|
| Projektant | Thomasa J. Kelly'ego |
| Kraj pochodzenia | Stany Zjednoczone |
| Operator | NASA |
| Aplikacje | Załogowe lądowanie na Księżycu |
| Specyfikacje | |
| Typ statku kosmicznego | Lądownik księżycowy |
| Uruchom masę | |
| Sucha masa | |
| Pojemność załogi | 2 |
| Tom | 235 stóp sześciennych (6,7 m3 ) |
| Moc | 28 V DC, 115 V 400 Hz AC |
| Baterie | Sześć lub siedem 28–32 V, 296 amperogodzin srebrno-cynkowych |
| Reżim | |
| Zaprojektuj życie | 75 godzin (przedłużony) |
| Wymiary | |
| Długość | 23 stopy 1 cal (7,04 m) |
| Średnica | 13 stóp 10 cali (4,22 m) bez podwozia |
| Szerokość | 31 stóp (9,4 m), podwozie wypuszczone |
| Produkcja | |
| Status | Emerytowany |
| Wybudowany | 15 |
| Wystrzelony | 10 |
| Operacyjny | 10 |
| Emerytowany | 1972 |
| Przegrany | 0 |
| Zaginiony | 0 |
| Dziewiczy start | 22 stycznia 1968 |
| Ostatnie uruchomienie | 7 grudnia 1972 |
| Ostatnia emerytura | 14 grudnia 1972 |
| Powiązany statek kosmiczny | |
| Leciał z | Moduł dowodzenia i obsługi Apollo |
| Konfiguracja | |
 | |
Apollo Lunar Module ( LM / l ɛ m / ), pierwotnie oznaczony jako Lunar Excursion Module ( LEM ), był księżycowym lądownikiem kosmicznym , który latał między orbitą księżycową a powierzchnią Księżyca podczas programu Apollo w Stanach Zjednoczonych . Był to pierwszy statek kosmiczny z załogą, który działał wyłącznie w bezpowietrznej próżni kosmicznej i pozostaje jedynym pojazdem z załogą, który wylądował gdziekolwiek poza Ziemią.
Strukturalnie i aerodynamicznie niezdolny do lotu przez ziemską atmosferę, dwustopniowy moduł księżycowy został przetransportowany na orbitę księżycową, dołączony do modułu dowodzenia i obsługi Apollo (CSM), około dwa razy większy niż jego masa. Jego dwuosobowa załoga przeleciała kompletnym modułem księżycowym z orbity księżycowej na powierzchnię Księżyca. Podczas startu zużyty stopień zniżania był używany jako platforma startowa dla etapu wznoszenia, który następnie poleciał z powrotem do modułu dowodzenia , po czym również został odrzucony.
Nadzorowany przez Grummana rozwój LM był nękany problemami, które opóźniły jego pierwszy lot bez załogi o około dziesięć miesięcy, a pierwszy lot z załogą o około trzy miesiące. Mimo to LM stał się najbardziej niezawodnym elementem pojazdu kosmicznego Apollo – Saturn . Całkowity koszt LM do rozwoju i wyprodukowanych jednostek wyniósł 21,3 miliarda dolarów w 2016 roku, korygując z nominalnej sumy 2,2 miliarda dolarów na podstawie wskaźników inflacji nowego startu NASA.
W kosmos wystrzelono dziesięć modułów księżycowych. Spośród nich sześć zostało wylądowanych przez ludzi na Księżycu w latach 1969-1972. Pierwsze dwa loty były testami na niskiej orbicie okołoziemskiej : Apollo 5 bez załogi; i Apollo 9 z załogą. Trzecim lotem testowym na niskiej orbicie księżycowej był Apollo 10 , próba generalna przed pierwszym lądowaniem, przeprowadzona na Apollo 11 . Moduł księżycowy Apollo 13 działał jako łódź ratunkowa, zapewniając podtrzymanie życia i napęd, aby utrzymać załogę przy życiu podczas podróży do domu, kiedy ich CSM został wyłączony przez eksplozję butli z tlenem w drodze na Księżyc.
Sześć etapów lądowania pozostaje na swoich miejscach lądowania; ich odpowiednie stopnie wznoszenia zderzyły się z Księżycem po użyciu. Jeden stopień wznoszenia (Apollo 10's Snoopy ) został odrzucony na orbicie heliocentrycznej po tym, jak jego stopień opadania został odrzucony na orbicie księżycowej. Pozostałe trzy LM spłonęły w ziemskiej atmosferze: cztery etapy Apollo 5 i Apollo 9 weszły osobno, podczas gdy Aquarius Apollo 13 ponownie wszedł jako jednostka.
Profil operacyjny
Podczas startu moduł księżycowy znajdował się bezpośrednio pod modułem dowodzenia i obsługi (CSM) ze złożonymi nogami, wewnątrz adaptera statku kosmicznego do LM (SLA) przymocowanego do trzeciego stopnia S-IVB rakiety Saturn V. Pozostał tam przez ziemską orbitę parkingową i spalenie rakiety z wtryskiem trans-księżycowym (TLI), aby wysłać statek w kierunku Księżyca.
Wkrótce po TLI otwarto umowę SLA; CSM wykonał manewr , w wyniku którego oddzielił się, zawrócił, wrócił do doku z modułem księżycowym i wydobył go z S-IVB. Podczas lotu na Księżyc luki dokujące zostały otwarte, a pilot modułu księżycowego wszedł do LM, aby tymczasowo włączyć zasilanie i przetestować wszystkie systemy z wyjątkiem napędu. Pilot modułu księżycowego pełnił rolę oficera inżyniera, monitorując systemy obu statków kosmicznych.
Po osiągnięciu księżycowej orbity parkingowej dowódca i pilot LM weszli do LM i włączyli zasilanie, wymienili włazy i sprzęt dokujący, rozłożyli i zablokowali nogi do lądowania oraz oddzielili się od CSM, lecąc niezależnie. Dowódca obsługiwał sterowanie lotem i przepustnicę silnika, podczas gdy pilot modułu księżycowego obsługiwał inne systemy statku kosmicznego i informował dowódcę o stanie systemów i informacjach nawigacyjnych. Po wzrokowej kontroli podwozia przez pilota modułu dowodzenia , LM został wycofany na bezpieczną odległość, a następnie obrócony, aż silnik opadania był skierowany do przodu w kierunku jazdy. Przeprowadzono 30-sekundowe wypalenie podczas wstawiania orbity zejścia w celu zmniejszenia prędkości i upuszczenia periluny LM na odległość około 50 000 stóp (15 km) od powierzchni, około 260 mil morskich (480 km) w górę od miejsca lądowania.

Gdy statek zbliżył się do niebezpieczeństwa, silnik opadania został ponownie uruchomiony, aby rozpocząć opadanie z napędem. W tym czasie załoga leciała na plecach, polegając na tym, że komputer spowolnił prędkość statku do przodu i pionową prawie do zera. Sterowanie odbywało się za pomocą kombinacji dławienia silnika i sterów strumieniowych, kierowanych przez komputer za pomocą radaru lądowania. Podczas hamowania LM obniżył się do około 10 000 stóp (3,0 km), a następnie w końcowej fazie podejścia do około 700 stóp (210 m). Podczas końcowego podejścia pojazd przechylił się do pozycji prawie pionowej, co pozwoliło załodze spojrzeć w przód i w dół, aby po raz pierwszy zobaczyć powierzchnię Księżyca.
Astronauci latali statkiem kosmicznym Apollo ręcznie tylko podczas podejścia do Księżyca. Ostatnia faza lądowania rozpoczęła się około 2000 stóp (0,61 km) w górę od docelowego miejsca lądowania. W tym momencie sterowanie ręczne zostało włączone dla dowódcy, który miał wystarczającą ilość paliwa , aby unosić się w powietrzu przez maksymalnie dwie minuty, aby sprawdzić, gdzie komputer zabiera statek i wprowadzić niezbędne poprawki. W razie potrzeby lądowanie można było przerwać niemal w dowolnym momencie, wyrzucając stopień zniżania i uruchamiając silnik wznoszenia, aby wspiąć się z powrotem na orbitę w celu awaryjnego powrotu do CSM. W końcu jedna lub więcej z trzech 67,2-calowych (1,71 m) sond wystających z podnóżków na nogach lądownika dotknęło powierzchni, aktywując lampkę kontrolną kontaktu, która zasygnalizowała dowódcy wyłączenie silnika opadania, pozwalając LM osiąść na powierzchnia. Podczas przyziemienia sondy byłyby wygięte nawet o 180 stopni, a nawet odłamane. Pierwotny projekt wykorzystywał sondy na wszystkich czterech nogach, ale począwszy od pierwszego lądowania (LM-5 na Apollo 11), ten przy drabinie został usunięty z obawy, że wygięta sonda po wylądowaniu może przebić skafander astronauty podczas schodzenia lub zszedł z drabiny.
Pierwotny plan aktywności kosmicznej , co najmniej do 1966 r., zakładał, że tylko jeden astronauta opuści LM, podczas gdy drugi pozostanie w środku „w celu utrzymania łączności”. Ostatecznie uznano, że komunikacja jest wystarczająco niezawodna, aby umożliwić obu członkom załogi chodzenie po powierzchni, pozostawiając statek kosmiczny tylko zdalnie obsługiwany przez kontrolę misji.
Począwszy od Apollo 14 , udostępniono dodatkowe paliwo LM do zniżania i lądowania z napędem, wykorzystując silnik CSM do osiągnięcia niebezpieczeństwa 50 000 stóp (15 km). Po odłączeniu statku kosmicznego CSM podniósł i zakreślił swoją orbitę na pozostałą część misji.
Gdy był gotowy do opuszczenia Księżyca, silnik wznoszenia LM uruchomił się, opuszczając etap opadania na powierzchni Księżyca. Po kilku korektach kursu LM spotkał się z CSM i zadokował, aby przenieść załogę i próbki skał. Po zakończeniu swojej pracy etap wznoszenia został oddzielony. Silnik etapu wznoszenia Apollo 10 był uruchamiany, dopóki jego paliwo nie zostało zużyte, wysyłając go poza Księżyc na orbitę heliocentryczną . Etap wznoszenia Apollo 11 został pozostawiony na orbicie księżycowej, aby ostatecznie się rozbić; wszystkie kolejne etapy wznoszenia (z wyjątkiem Apollo 13) były celowo kierowane na Księżyc w celu uzyskania odczytów z sejsmometrów umieszczonych na powierzchni.
Historia

Moduł księżycowy (pierwotnie oznaczony jako Lunar Excursion Module, znany pod akronimem LEM ) został zaprojektowany po tym, jak NASA zdecydowała się dotrzeć na Księżyc przez Lunar Orbit Rendezvous (LOR) zamiast bezpośredniego wznoszenia lub metod Earth Orbit Rendezvous (EOR). Zarówno bezpośrednie wznoszenie, jak i EOR wiązałyby się z lądowaniem znacznie cięższego, kompletnego statku kosmicznego Apollo na Księżycu. Po podjęciu decyzji o kontynuowaniu korzystania z LOR konieczne stało się wyprodukowanie oddzielnego statku zdolnego do dotarcia na powierzchnię Księżyca i powrotu na orbitę Księżyca.
Wynajem kontraktowy i lokalizacja budowy
W lipcu 1962 roku jedenaście firm zostało zaproszonych do składania ofert na LEM. Dziewięć firm odpowiedziało we wrześniu, odpowiadając na 20 pytań zadanych przez NASA RFP w 60-stronicowej ograniczonej propozycji technicznej. Grumman otrzymał kontrakt oficjalnie 7 listopada 1962 r. Grumman rozpoczął badania rendezvous na orbicie księżycowej pod koniec lat pięćdziesiątych i ponownie w 1961 r. Oczekiwano, że koszt kontraktu wyniesie około 350 milionów dolarów. Początkowo było czterech głównych podwykonawców: Bell Aerosystems ( silnik wznoszący ), Hamilton Standard (systemy kontroli środowiska), Marquardt (system kontroli reakcji) i Rocketdyne ( silnik opadający ).
Podstawowy system naprowadzania, nawigacji i kontroli (PGNCS) został opracowany przez MIT Instrumentation Laboratory ; Apollo Guidance Computer został wyprodukowany przez firmę Raytheon (podobny system naprowadzania zastosowano w module dowodzenia ). Zapasowe narzędzie nawigacyjne, Abort Guidance System (AGS), zostało opracowane przez TRW.
Apollo Lunar Module został zmontowany w fabryce Grummana w Bethpage w stanie Nowy Jork .
Faza projektowania

Apollo Lunar Module został zaprojektowany głównie przez inżyniera lotniczego Grummana, Thomasa J. Kelly'ego . Pierwszy projekt LEM wyglądał jak mniejsza wersja modułu dowodzenia i obsługi Apollo (kabina w kształcie stożka na szczycie cylindrycznej sekcji napędowej) ze składanymi nogami. Drugi projekt odwoływał się do idei kokpitu helikoptera z dużymi zakrzywionymi oknami i siedzeniami, aby poprawić widoczność astronautów podczas zawisu i lądowania. Obejmuje to również drugi, przedni port dokowania, umożliwiający załodze LEM odgrywanie aktywnej roli w dokowaniu do CSM.
W miarę kontynuacji programu wprowadzono liczne przeprojektowania mające na celu zmniejszenie masy, poprawę bezpieczeństwa i rozwiązanie problemów. Najpierw zniknęły ciężkie okna kokpitu i siedzenia; astronauci staliby podczas lotu LEM, wspierani przez system linek i kół pasowych, z mniejszymi trójkątnymi oknami zapewniającymi wystarczającą widoczność miejsca lądowania. Później usunięto nadmiarowy przedni port dokowania, co oznaczało, że pilot dowodzenia zrezygnował z aktywnej kontroli nad dokowaniem na rzecz pilota modułu dowodzenia; wciąż widział zbliżający się CSM przez małe okienko nad głową. Wyjście podczas noszenia nieporęcznych skafandrów kosmicznych do aktywności poza pojazdem zostało ułatwione dzięki prostszemu włazowi do przodu (32 cale × 32 cale lub 810 mm × 810 mm).
Konfiguracja została zamrożona w kwietniu 1963 r., Kiedy zdecydowano o projektach silników wznoszenia i opadania. Oprócz Rocketdyne, w lipcu 1963 r. Zamówiono równoległy program dla silnika opadania w Space Technology Laboratories (TRW) , a do stycznia 1965 r. Umowa z Rocketdyne została anulowana.
Początkowo energia miała być wytwarzana przez ogniwa paliwowe zbudowane przez Pratta i Whitneya, podobne do CSM, ale w marcu 1965 roku zostały one odrzucone na rzecz konstrukcji całkowicie akumulatorowej.
Początkowy projekt miał trzy nogi do lądowania, najlżejszą możliwą konfigurację. Ale ponieważ każda konkretna noga musiałaby unieść ciężar pojazdu, gdyby wylądował pod znacznym kątem, była to również najmniej stabilna konfiguracja, gdyby jedna z nóg została uszkodzona podczas lądowania. Następna iteracja projektu podwozia miała pięć nóg i była najbardziej stabilną konfiguracją do lądowania na nieznanym terenie. Ta konfiguracja była jednak zbyt ciężka i projektanci poszli na kompromis w sprawie czterech nóg podporowych.
W czerwcu 1966 nazwa została zmieniona na Lunar Module (LM), eliminując słowo „ wycieczka” . Według George'a Lowa , kierownika Biura Programu Statków Kosmicznych Apollo, stało się tak dlatego, że NASA obawiała się, że słowo wycieczka może nadać Apollo niepoważną nutę. Pomimo zmiany nazwy astronauci i inny personel NASA i Grumman nadal wymawiali skrót jako ( / l ɛ m / ) zamiast liter „LM”.
Szkolenie astronautów

Porównując lądowanie na Księżycu do „operacji w zawisie”, Gus Grissom powiedział w 1963 roku, że chociaż większość wczesnych astronautów była pilotami myśliwców, „teraz zastanawiamy się, czy pilot wykonujący to pierwsze lądowanie na Księżycu nie powinien być bardzo doświadczonym pilotem helikoptera” . Aby umożliwić astronautom naukę technik lądowania na Księżycu, w 1964 roku NASA zleciła firmie Bell Aerosystems zbudowanie pojazdu badawczego Lunar Landing Research Vehicle (LLRV), który wykorzystywał zamontowany na kardanie pionowy silnik odrzutowy, aby przeciwdziałać pięciu szóstym swojej wagi, symulując grawitację Księżyca, w dodatek do własnych silników odrzutowych nadtlenku wodoru w celu symulacji silnika opadania LM i kontroli położenia. Pomyślne testy dwóch prototypów LLRV w Dryden Flight Research Center doprowadziły w 1966 roku do produkcji trzech pojazdów szkoleniowych do lądowania na Księżycu (LLTV), które wraz z LLRV były używane do szkolenia astronautów w Houston Manned Spacecraft Center. Ten samolot okazał się dość niebezpieczny w lataniu, ponieważ trzy z pięciu zostały zniszczone w wypadkach. Był wyposażony w fotel wyrzucany napędzany rakietą, więc w każdym przypadku przeżył pilot, w tym pierwszy człowiek, który stanął na Księżycu, Neil Armstrong .
Loty rozwojowe

LM-1 został zbudowany, aby wykonać pierwszy lot bez załogi w celu przetestowania systemów napędowych, wystrzelony na niską orbitę okołoziemską na szczycie Saturna IB . Pierwotnie planowano to na kwiecień 1967 r., A następnie pierwszy lot z załogą później tego samego roku. Ale problemy rozwojowe LM nie zostały docenione, a lot LM-1 został opóźniony do 22 stycznia 1968 r. jako Apollo 5 . W tym czasie LM-2 był trzymany w rezerwie na wypadek niepowodzenia lotu LM-1, co nie miało miejsca.
LM-3 stał się teraz pierwszym LM z załogą, który ponownie został oblatany na niskiej orbicie okołoziemskiej w celu przetestowania wszystkich systemów i przećwiczenia separacji, spotkania i dokowania zaplanowanych dla Apollo 8 w grudniu 1968 r. Ale znowu problemy w ostatniej chwili opóźniły jego lot do Apollo 9 3 marca 1969 r. Drugi lot próbny z załogą na wyższej orbicie okołoziemskiej miał odbyć się po LM-3, ale został on odwołany, aby harmonogram programu był zgodny z planem.
Apollo 10 wystartował 18 maja 1969 r., Używając LM-4 do „próby generalnej” przed lądowaniem na Księżycu, ćwicząc wszystkie fazy misji z wyjątkiem inicjacji zejścia z napędem podczas startu. LM zszedł na wysokość 47 400 stóp (9,0 mil; 14,4 km) nad powierzchnię Księżyca, a następnie wyrzucił stopień opadania i użył swojego silnika wznoszenia, aby powrócić do CSM.
Loty produkcyjne

Pierwsze lądowanie na Księżycu z załogą miało miejsce 20 lipca 1969 r. na Apollo 11 LM-5 Eagle . Cztery dni później załoga Apollo 11 w module dowodzenia Columbia spadła na Ocean Spokojny, wypełniając cel prezydenta Johna F. Kennedy'ego : „...przed upływem tej dekady wylądować człowieka na Księżycu i bezpiecznie sprowadzić go na Ziemia".
Po tym nastąpiły lądowania Apollo 12 (LM-6 Intrepid ) i Apollo 14 (LM-8 Antares ). W kwietniu 1970 roku Apollo 13 LM-7 Aquarius odegrał nieoczekiwaną rolę w ratowaniu życia trzech astronautów po pęknięciu zbiornika tlenu w module serwisowym , wyłączając CSM. Aquarius służył jako „łódź ratunkowa” dla astronautów podczas ich powrotu na Ziemię. Jego silnik stopnia zniżania został użyty do wymiany uszkodzonego silnika CSM Service Propulsion System, a jego akumulatory dostarczały energię na podróż do domu i ładowały akumulatory modułu dowodzenia, które były niezbędne do ponownego wejścia. Astronauci wodowali bezpiecznie 17 kwietnia 1970 r. Systemy LM, zaprojektowane do obsługi dwóch astronautów przez 45 godzin (w tym dwukrotne obniżenie i ponowne zwiększenie ciśnienia powodujące utratę dopływu tlenu), w rzeczywistości rozciągnęły się, aby wspierać trzech astronautów przez 90 godzin (bez obniżania i ponownego zwiększania ciśnienia i utrata dopływu tlenu).
Czasy zawisu zostały zmaksymalizowane w ostatnich czterech misjach lądowania dzięki zastosowaniu silnika modułu serwisowego do wykonania wstępnego zejścia na orbitę spalić 22 godziny przed oddzieleniem LM od CSM, praktykę rozpoczętą na Apollo 14. Oznaczało to, że cały statek kosmiczny, w tym CSM okrążył Księżyc w odległości 9,1 mili morskiej (16,9 km) perilune, umożliwiając LM rozpoczęcie zjazdu z napędem z tej wysokości z pełnym ładunkiem paliwa napędowego etapu opadania, pozostawiając więcej zapasu paliwa na końcowe podejście. CSM podniósłby wówczas swoje niebezpieczeństwo z powrotem do normalnych 60 mil morskich (110 km).
Rozszerzone misje klasy J

Rozszerzony moduł księżycowy (ELM) używany w ostatnich trzech „misjach klasy J” — Apollo 15 , 16 i 17 — został zmodernizowany w celu lądowania większych ładunków i dłuższego pozostawania na powierzchni Księżyca. Ciąg silnika podczas opadania został zwiększony przez dodanie 10-calowego (250 mm) przedłużenia do dzwonu silnika, a zbiorniki paliwa podczas opadania zostały powiększone. Do etapu zejścia dodano zbiornik na odpady, z instalacją wodociągową ze etapu wznoszenia. Te ulepszenia umożliwiły pobyt na Księżycu do 75 godzin.
Lunar Roving Vehicle został złożony i przeniesiony w kwadrancie 1 etapu schodzenia. Został wdrożony przez astronautów po wylądowaniu, umożliwiając im eksplorację dużych obszarów i zwrócenie większej różnorodności próbek księżycowych.
Specyfikacje




Podane tutaj masy są wartościami średnimi dla oryginalnych pojazdów ze specyfikacją sprzed ELM. Szczegółowe wagi dla każdej misji można znaleźć w artykułach dotyczących poszczególnych misji.
Etap wznoszenia
Etap wznoszenia zawierał kabinę załogi z tablicami przyrządów i sterowaniem lotem. Zawierał własny silnik Ascent Propulsion System (APS) i dwa hipergoliczne zbiorniki paliwa do powrotu na orbitę księżycową i spotkania z modułem dowodzenia i obsługi Apollo . Zawierał również system kontroli reakcji (RCS) do kontroli położenia i translacji , który składał się z szesnastu hipergolicznych silników odrzutowych podobnych do tych używanych w module serwisowym, zamontowanych w czterech quadach, z własnym zasilaniem paliwem. Przedni właz do aktywności poza pojazdem zapewniał dostęp do iz powierzchni Księżyca, podczas gdy właz górny i port dokujący zapewniały dostęp do iz modułu dowodzenia.
Wyposażenie wewnętrzne obejmowało system kontroli środowiska (podtrzymywania życia); system łączności VHF z dwiema antenami do komunikacji z Modułem Dowodzenia; ujednolicony system pasma S i sterowana antena paraboliczna do komunikacji z Ziemią; antena do aktywności poza pojazdem, przypominająca miniaturowy parasol, który przekazywał komunikację z anten w przenośnych systemach podtrzymywania życia astronautów przez LM; podstawowe (PGNCS) i rezerwowe (AGS) systemy naprowadzania i nawigacji; wyrównujący teleskop optyczny do wizualnego określania orientacji statku kosmicznego; radar rendez-vous z własną sterowaną anteną talerzową; oraz system aktywnej kontroli termicznej. Akumulatory elektryczne, woda chłodząca i tlen do oddychania były przechowywane w ilościach wystarczających na początkowo 48-godzinny pobyt na powierzchni Księżyca, przedłużony do 75 godzin w późniejszych misjach.
Podczas postoju na Księżycu załoga spała na hamakach rozwieszonych poprzecznie w kabinie.
Ładunek powrotny obejmował próbki księżycowej skały i gleby zebrane przez załogę (aż 238 funtów (108 kg) na Apollo 17) oraz ich naświetlony film fotograficzny .
- Załoga: 2
- Objętość kabiny załogi: 235 stóp sześciennych (6,7 m 3 )
- Kubatura mieszkalna: 160 stóp sześciennych (4,5 m 3 )
- Wysokość przedziału załogi: 7 stóp 8 cali (2,34 m)
- Głębokość przedziału załogi: 3 stopy 6 cali (1,07 m)
- Wysokość: 9 stóp 3,5 cala (2,832 m)
- Szerokość: 14 stóp 1 cal (4,29 m)
- Głębokość: 13 stóp 3 cale (4,04 m)
- Masa sucha: 4740 funtów (2150 kg)
- Masa brutto: 10300 funtów (4700 kg)
- Atmosfera: 100% tlenu przy 4,8 psi (33 kPa)
- Woda: dwa zbiorniki o pojemności 42,5 funta (19,3 kg).
- Płyn chłodzący: 25 funtów (11 kg) roztworu glikolu etylenowego / wody
- Thermal Control: jeden aktywny sublimator z lodem wodnym
- Masa paliwa RCS: 633 funtów (287 kg)
- Pędniki RCS: szesnaście x 100 funtów siły (440 N) w czterech quadach
- Propelenty RCS: paliwo Aerozine 50 / utleniacz tetratlenek diazotu (N 2 O 4 )
- Impuls właściwy RCS : 290 s (2,8 km/s)
- Masa paliwa APS: 5187 funtów (2353 kg) przechowywanych w dwóch zbiornikach paliwa o pojemności 36 stóp sześciennych (1,02 m3 )
- Silnik APS: Bell Aerospace LM Ascent Engine (LMAE) i wtryskiwacze Rocketdyne LMAE
- Ciąg APS: 3500 funtów siły (16 000 N)
- Propelenty APS: paliwo Aerozine 50 / utleniacz tetratlenku diazotu
- Środek ciśnieniowy APS: dwa zbiorniki helu o pojemności 6,4 funta (2,9 kg) pod ciśnieniem 3000 funtów na cal kwadratowy (21 MPa)
- Impuls właściwy APS : 311 s (3,05 km/s)
- APS delta-V : 7280 stóp / s (2220 m / s)
- Stosunek ciągu do masy podczas startu: 2,124 (przy grawitacji księżycowej)
- Baterie: dwie baterie srebrno-cynkowe 28–32 V, 296 amperogodzin ; 125 funtów (57 kg) każdy
- Zasilanie: 28 V DC, 115 V 400 Hz AC
Etap zejścia

Podstawowym zadaniem stopnia zniżania było wspomaganie lądowania z napędem i powierzchniowej aktywności kosmicznej. Po zakończeniu wycieczki służył jako platforma startowa do etapu wznoszenia. Jego ośmiokątny kształt był wsparty na czterech składanych goleniach podwozia i zawierał silnik Descent Propulsion System (DPS) z przepustnicą i czterema hipergolicznymi zbiornikami paliwa. Antena radaru dopplerowskiego o fali ciągłej została zamontowana przy osłonie termicznej silnika na dolnej powierzchni, aby przesyłać dane dotyczące wysokości i prędkości opadania do systemu naprowadzania i wyświetlacza pilota podczas lądowania. Prawie wszystkie powierzchnie zewnętrzne, z wyjątkiem blatu, platformy, drabiny, silnika zjazdowego i osłony termicznej, były pokryte bursztynowymi, ciemnymi (czerwonawymi) bursztynowymi, czarnymi, srebrnymi i żółtymi aluminiowanymi kocami z folii Kapton do izolacji termicznej . Noga do lądowania numer 1 (przednia) miała przymocowaną platformę (nieformalnie zwaną „gankiem”) przed włazem do wykonywania czynności poza pojazdem na etapie wznoszenia oraz drabinę, której astronauci używali do wchodzenia i schodzenia między kabiną na powierzchnię. Podnóżek każdej nogi do lądowania zawierał sondę czujnika kontaktu z powierzchnią o długości 67 cali (1,7 m), która sygnalizowała dowódcy wyłączenie silnika opadania. (Sonda została pominięta w etapie numer 1 każdej misji lądowania, aby uniknąć niebezpieczeństwa przebicia skafandra przez astronautów, ponieważ sondy miały tendencję do odrywania się i wystawania w górę z powierzchni).
Sprzęt do eksploracji Księżyca był przewożony w Modular Equipment Stowage Assembly (MESA), szufladzie zamontowanej na zawiasowym panelu wysuwającym się z lewego przedniego przedziału. Oprócz narzędzi astronauty do wykopów na powierzchni i pojemników do pobierania próbek, MESA zawierała kamerę telewizyjną ze statywem; gdy dowódca otworzył MESA, pociągając za smycz podczas schodzenia po drabinie, kamera została automatycznie aktywowana, aby wysłać pierwsze zdjęcia astronautów na powierzchni z powrotem na Ziemię. Flaga Stanów Zjednoczonych , którą astronauci mieli postawić na powierzchni, była przenoszona w pojemniku zamontowanym na drabinie każdej misji lądowania.
Pakiet Early Apollo Surface Experiments Package (później Apollo Lunar Surface Experiments Package ) był przewożony w przeciwległym przedziale za LM. Zewnętrzna komora na prawym przednim panelu zawierała rozkładaną antenę pasma S, która po otwarciu wyglądała jak odwrócony parasol na statywie. Nie był używany podczas pierwszego lądowania ze względu na ograniczenia czasowe i fakt, że akceptowalna komunikacja była odbierana za pomocą anteny pasma S LM, ale był używany na Apollo 12 i 14. Ręcznie ciągnięty transporter sprzętu modułowego (MET ) , podobny z wyglądu do wózka golfowego, był przewożony na Apollo 13 i 14, aby ułatwić przenoszenie narzędzi i próbek podczas długich spacerów po księżycu. W misjach rozszerzonych ( Apollo 15 i nowsze) antena i kamera telewizyjna były montowane na Lunar Roving Vehicle , który był przenoszony złożony i montowany na zewnętrznym panelu. Przedziały zawierały również zamienne baterie przenośnego systemu podtrzymywania życia (PLSS) i dodatkowe kanistry z wodorotlenkiem litu podczas rozszerzonych misji.
- Wysokość: 10 stóp 7,2 cala (3,231 m) (plus 5 stóp 7,2 cala (1,707 m) sond do lądowania)
- Szerokość / głębokość bez podwozia: 13 stóp 10 cali (4,22 m)
- Szerokość / głębokość, podwozie wysunięte: 31,0 stóp (9,4 m)
- Masa wraz z propelentem: 22783 funtów (10334 kg)
- Woda: jeden zbiornik o pojemności 151 kg (333 funtów).
- Masa paliwa DPS: 18 000 funtów (8200 kg) przechowywanych w czterech zbiornikach paliwa o pojemności 67,3 stopy sześciennej (1,906 m3 )
- Silnik DPS: silnik opadający TRW LM (LMDE)
- Ciąg DPS: 10125 funtów siły (45040 N), z możliwością dławienia w zakresie od 10% do 60% pełnego ciągu
- Propelenty DPS: paliwo Aerozine 50 / utleniacz tetratlenku azotu
- Środek ciśnieniowy DPS: jeden 49-funtowy (22 kg) zbiornik helu nadkrytycznego pod ciśnieniem 1555 psi (10,72 MPa)
- Impuls właściwy DPS : 311 s (3050 N⋅s/kg)
- DPS delta-V : 8100 stóp / s (2500 m / s)
- Baterie: cztery (Apollo 9–14) lub pięć (Apollo 15–17) 28–32 V, 415 A⋅h baterie srebrno-cynkowe; 135 funtów (61 kg) każdy
Wyprodukowano moduły księżycowe
| Numer seryjny | Nazwa | Używać | Data uruchomienia | Lokalizacja | Obraz |
|---|---|---|---|---|---|
| LTA-1 | nielotny | Cradle of Aviation Museum (Long Island, NY) |

|
||
| LTA-2R | Apollo 6 | 4 kwietnia 1968 | Ponownie wszedł w ziemską atmosferę |
|
|
| LTA-3A | nielotny | Centrum Kosmosfery i Kosmosu w Kansas |

|
||
| LTA-3DR | Niezrealizowany etap zniżania | Instytut Franklina |

|
||
| LTA-5D | nielotny | Ośrodek testowy NASA White Sands | |||
| LTA-8A | Test modułu księżycowego Artykuł nr 8 | Testy termiczno-próżniowe | Testy naziemne w 1968 roku | Centrum Kosmiczne Houston |
|
| LTA-10R | Apollo 4 | 9 listopada 1967 | Ponownie wszedł w ziemską atmosferę | ||
| MSC-16 | Etap wznoszenia bez lotu | Muzeum Nauki i Przemysłu (Chicago) |

|
||
| TM-5 | Nielot | Muzeum Życia i Nauki (Durham, Karolina Północna) |

|
||
| PA-1 | nielotny | Ośrodek testowy White Sands | |||
| LM-1 | Apollo 5 | 22 stycznia 1968 | Ponownie wszedł w ziemską atmosferę |
-7_in_the_Kennedy_Space_Center%27s_Manned_Spacecraft_Operations_Building.jpg)
|
|
| LM-2 | Przeznaczony do drugiego lotu bez załogi, zamiast tego używany do testów naziemnych. Dodano podwozie do testów zrzutowych. Brakuje wyrównującego teleskopu optycznego i komputera pokładowego |
Narodowe Muzeum Lotnictwa i Przestrzeni Kosmicznej (Waszyngton, DC) |

|
||
| LM-3 | Pająk | Apollo 9 | 3 marca 1969 | Etapy opadania i wznoszenia się ponownie weszły w atmosferę ziemską oddzielnie |

|
| LM-4 | wścibski | Apollo 10 | 18 maja 1969 | Etap opadania mógł uderzyć w Księżyc, etap wznoszenia się na orbicie heliocentrycznej. Snoopy to jedyny etap wznoszenia LM, o którym wiadomo, że przetrwał w stanie nienaruszonym (prawdopodobnie asteroida 2018 AV2). |

|
| LM-5 | Orzeł | Apollo 11 | 16 lipca 1969 | Stopień zejścia na powierzchnię Księżyca w Morzu Spokoju , stopień wznoszenia pozostawiony na orbicie księżycowej (może nadal krążyć wokół Księżyca) |

|
| LM-6 | Nieustraszony | Apollo 12 | 14 listopada 1969 | Etap zejścia na powierzchnię Księżyca w Oceanie Burz , etap wznoszenia celowo zderzył się z Księżycem |

|
| LM-7 | Wodnik | Apollo 13 | 11 kwietnia 1970 | Ponownie wszedł w ziemską atmosferę |

|
| LM-8 | Antares | Apollo 14 | 31 stycznia 1971 | Etap zejścia na powierzchnię Księżyca na Fra Mauro , etap wznoszenia celowo zderzył się z Księżycem |

|
| LM-9 | Nie oblatany, pomyślany jako Apollo 15, ostatnia misja klasy H |
Na wystawie w Centrum Kosmicznym im. Kennedy'ego (Apollo/Saturn V Center) |

|
||
| LM-10 | Sokół | Apollo 15 , pierwszy ELM | 26 lipca 1971 | Etap zejścia na powierzchnię Księżyca w Hadley-Apennine , etap wznoszenia celowo zderzył się z Księżycem |

|
| LM-11 | Orion | Apollo 16 | 16 kwietnia 1972 | Stopień zniżania na powierzchni Księżyca na Wyżynie Kartezjusza , stopień wznoszenia pozostawiony na orbicie księżycowej, rozbił się na Księżycu |

|
| LM-12 | Pretendent | Apollo 17 | 7 grudnia 1972 | Etap opadania na powierzchni Księżyca w Taurus-Littrow , stopień wznoszenia celowo zderzył się z Księżycem |

|
| LM-13 |
Nie latał, miał być Apollo 19 |
Częściowo ukończony przez Grummana , odrestaurowany i wystawiony w Cradle of Aviation Museum (Long Island, NY). Używany również podczas miniserialu z 1998 roku From the Earth to the Moon . |

|
||
| LM-14 |
Nie latał, miał być Apollo 20 | Niekompletny, najprawdopodobniej złomowany |
|
||
| LM-15 |
Nie oblatany, przeznaczony do modyfikacji w montażu Apollo Telescope Mount |
Niekompletny, złomowany |
|||
| * Lokalizacja LM pozostawionych na powierzchni Księżyca znajduje się na liście obiektów stworzonych przez człowieka na Księżycu . | |||||


Proponowane pochodne
Montaż teleskopu Apollo

Jednym z proponowanych zastosowań Apollo był orbitalny teleskop słoneczny zbudowany z nadwyżki LM z silnikiem opadającym zastąpionym teleskopem sterowanym z kabiny stopnia wznoszenia, usuniętymi nogami do lądowania i czterema panelami słonecznymi „wiatrakowymi” wystającymi z ćwiartek etapu opadania. Zostałby wystrzelony na bezzałogowym Saturnie 1B i zadokowany z załogowym modułem dowodzenia i obsługi , nazwany Apollo Telescope Mission (ATM).
Pomysł ten został później przeniesiony do oryginalnego projektu mokrego warsztatu dla warsztatu orbitalnego Skylab i przemianowany na uchwyt Apollo Telescope Mount, który ma być zadokowany na bocznym porcie adaptera wielokrotnego dokowania (MDA) warsztatu. Kiedy Skylab przeszedł na projekt „suchego warsztatu”, prefabrykowany na ziemi i wystrzelony na Saturnie V, teleskop został zamontowany na ramieniu na zawiasach i sterowany z wnętrza MDA. Zachowano tylko ośmiokątny kształt pojemnika teleskopu, panele słoneczne i nazwę mocowania teleskopu Apollo, chociaż nie było już żadnego związku z LM.
Ciężarówka LM
Ciężarówka Apollo LM (znana również jako Lunar Payload Module) była samodzielnym etapem opadania LM, który miał dostarczyć do 11 000 funtów (5,0 ton) ładunku na Księżyc w celu lądowania bez załogi. Technika ta miała na celu dostarczanie sprzętu i zaopatrzenia do stałej bazy księżycowej z załogą . Jak pierwotnie proponowano, zostałby wystrzelony na Saturnie V z pełną załogą Apollo, która miała towarzyszyć mu na orbitę księżycową i poprowadzić go do lądowania obok bazy; następnie załoga bazy rozładowywałaby „ciężarówkę”, podczas gdy załoga orbitująca wracała na Ziemię. W późniejszych planach AAP LPM byłby dostarczany przez prom księżycowy bez załogi.
Przedstawienie w filmie i telewizji
Film Rona Howarda Apollo 13 z 1995 roku , będący dramatyzacją tej misji z Tomem Hanksem , Kevinem Baconem i Billem Paxtonem w rolach głównych , został nakręcony przy użyciu realistycznych rekonstrukcji wnętrza statku kosmicznego Wodnika i modułu dowodzenia Odyseja .
Rozwój i budowa modułu księżycowego została przedstawiona w miniserialu From the Earth to the Moon z 1998 roku , zatytułowanym „Spider” . Odnosi się to do LM-3, używanego na Apollo 9, którego załoga nazwała Spider od jego pajęczego wyglądu. Nieużywany LM-13 pojawił się podczas teleplayu, aby przedstawić LM-3 i LM-5, Eagle , używane przez Apollo 11.
Apollo 11 Lunar Module Eagle jest przedstawiony w filmie First Man z 2018 roku , biografii Neila Armstronga .
Głoska bezdźwięczna
Neil Armstrong ląduje Apollo 11 Lunar Module Eagle na Księżycu 20 lipca 1969 r., tworząc Tranquility Base . Zaczyna się około 6200 stóp od powierzchni.
David Scott ląduje Falconem modułu księżycowego Apollo 15 na Księżycu 30 lipca 1971 r., widziany z perspektywy pilota modułu księżycowego. Zaczyna się około 5000 stóp od powierzchni.
Moduł księżycowy Apollo 15 Falcon startuje z Księżyca, 2 sierpnia 1971 r. Widok z kamery telewizyjnej na Lunar Roving Vehicle .
Start modułu księżycowego Apollo 15. Widok od wewnątrz Sokoła .
Apollo 17 Lunar Module Challenger startuje z Księżyca 14 grudnia 1972 r. Widok z kamery telewizyjnej na Lunar Roving Vehicle.

Plany lokalizacji urządzeń (1 z 2)
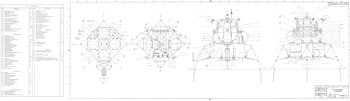
Plany lokalizacji urządzeń (2 z 2)

Kontroluje plany
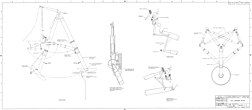
Plany podwozia




Zobacz też
- Lista projektów lądowników księżycowych z załogą
- LK (statek kosmiczny)
- Systemy ucieczki na Księżycu
- Zestaw do pomiaru ciągu Rolls-Royce'a , „Flying Beadstead”
Bibliografia
Dalsza lektura
- Kelly, Thomas J. (2001). Moon Lander: Jak opracowaliśmy moduł księżycowy Apollo (Smithsonian History of Aviation and Spaceflight Series). Smithsonian Institution Press. ISBN 1-56098-998-X .
- Baker, David (1981). Historia załogowych lotów kosmicznych . Wydawcy koronni. ISBN 0-517-54377-X
- Brooks, Courtney J., Grimwood, James M. and Swenson, Loyd S. Jr (1979) Rydwany dla Apollo: A History of Manned Lunar Spacecraft NASA SP-4205.
- Haeuplik-Meusburger S. (2011). Architektura dla astronautów. Podejście oparte na aktywności. Skoczek. [1] ISBN 978-3-7091-0666-2
- Pellegrino, Charles R. i Stoff, Joshua. (1985) Rydwany dla Apolla: nieopowiedziana historia wyścigu na Księżyc . Ateneum. ISBN 0-689-11559-8 (To nie jest książka z serii historii NASA o tym samym tytule podstawowym, jak powyżej, ale praca całkowicie niezwiązana).
- Sullivan, Scott P. (2004) Virtual LM: A Picture Essay of the Engineering and Construction of the Apollo Lunar Module . Książki Apogeum . ISBN 1-894959-14-0
- Stoff, Joshua. (2004) Budowanie statków księżycowych: moduł księżycowy Grummana . Wydawnictwo Arkadia. ISBN 0-7385-3586-9
Linki zewnętrzne
- Dokumentacja modułu księżycowego NASA Dziennik powierzchni księżyca
- Przegląd lądowisk Apollo w Google Moon
- Katalog NASA: Moduł księżycowy Apollo 14
- Demonstracja modułu Lunar Excursion Module i wyjaśnienie jego systemów (1966, Thomas Kelly w fabryce Grumman na Long Island, odcinek Science Reporter , film MIT opublikowany na YouTube)
- Space / Craft Assembly & Test Remembered - Witryna „poświęcona mężczyznom i kobietom, którzy zaprojektowali, zbudowali i przetestowali moduł księżycowy w Grumman Aerospace Corporation, Bethpage, Nowy Jork”
- Nazwaliśmy to „The Bug” , DC Agle, Air & Space Magazine , 1 września 2001 r. — Przegląd zejścia LM
- Apollo 11 LM Structures handout for LM-5 (PDF) - Dokument szkoleniowy przekazany astronautom, który ilustruje wszystkie dyskretne struktury LM
- Podręcznik operacji Apollo, moduł księżycowy (LM 10 i kolejne), tom pierwszy. Dane podsystemów (PDF) Podręcznik producenta obejmujący systemy LM.
- Podręcznik operacji Apollo, moduł księżycowy (LM 11 i kolejne), tom drugi. Podręcznik producenta procedur operacyjnych obejmujący procedury stosowane podczas lotu LM.
- Apollo 15 LM Activation Checklist for LM-10 – Lista kontrolna szczegółowo opisująca sposób przygotowania LM do aktywacji i lotu podczas misji
- Film z uruchomienia modułu księżycowego
Gry
- Proceduralna symulacja lądownika księżycowego Perilune 3D
- Lądownik Gra symulacyjna lądowania 2D modułu księżycowego online
- Easy Lander 3D gra symulacyjna lądowania modułu księżycowego